|
In reference to:
Francis Brown. Invariant Differential Forms on Complexes of Graphs and Feynman Integrals. 2021. 2101.04419.pdf (arxiv.org) Acknowledgement: Thank you to Prof. Peter Smillie for introducing me to this problem and discussing it with me numerous times. Graph Complex
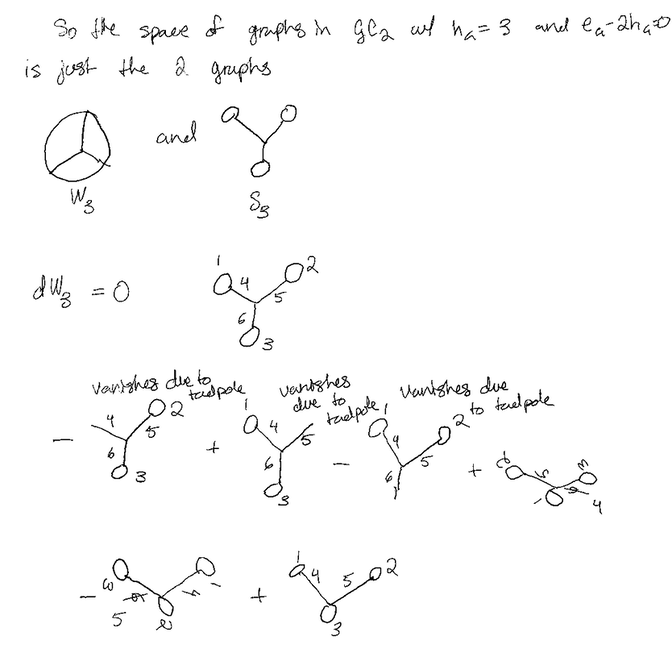
A graph complex (denoted \(\mathcal{G}\mathcal{C}_{2}\)) is an open simplex which refers to the space of all connected graphs which satisfy the following:
1. Does not have any doubled edges. 2. Does not have tadpoles (essentially an edge with an unconnected vertex) 3. All vertices have degree \(\ge 3\) 4. And the following relations hold for all \(G \in \mathcal{G}\mathcal{C}_{2}\) \[(G, -\eta) = -(G, \eta)\] \[(G, \eta) = (G', \sigma (\eta))\] where \(\eta\) is an orientation represented by an ordering of the edges of the graph, for example: 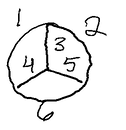
has \(\eta\) = 124356. \(\sigma(\eta)\) is some permutation of the arbitrary generator \(\eta\). For the following graph
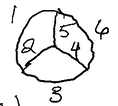
\(\sigma(\eta)\) = 162543 which is an even permutation of \(\eta\). If instead \(\sigma(\eta)\) was an odd permutation of \(\eta\), we would have \[-(G', \sigma(\eta)) = (G, -\eta)\] \[(G, \eta) - (G', \sigma(\eta)) = 0\] from the conditions above. That is, \(G\) and \(G'\) would add to 0.
Differential
A differential is defined on \(\mathcal{G}\mathcal{C}_{2}\) by \[d[G, e_{1}\wedge...\wedge e_{n}] = \sum_{i = 1}^{n}(-1)^{i}[G//e_{i}, e_1\wedge... \wedge \hat{e_{i}}\wedge...\wedge e_{n}]\] where the \(\hat{e_{i}}\) notation indicates the removal of that edge from the orientation and \(G//e_{i}\) is the graph resulting from the contraction of edge \(e_{i}\). For example, if we return to \(G\) as the first 3 spoked wheel graph above, we have \(G//e_{2} =\)
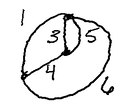
Where \(G//e_{2}\) has a doubled edge (edges 3 and 5) and thus the graph has a zero value/vanishes in the \(\mathcal{G}\mathcal{C}_{2}\) context. In fact, this is the case for each term resulting from the contraction of the other edges of \(G\) and more generally, this is the case for any wheel graph since the contraction of any edge in a 3 cycle necessarily creates a 2 cycle (this applies to any \(n\)-cycle where wedge contraction creates an (n-1)-cycle).
Therefore, \(dG\) for \(G\) the 3 spoked wheel above (denoted \(W_{3}\)) results in \(dG = 0\). Homology and Cohomology
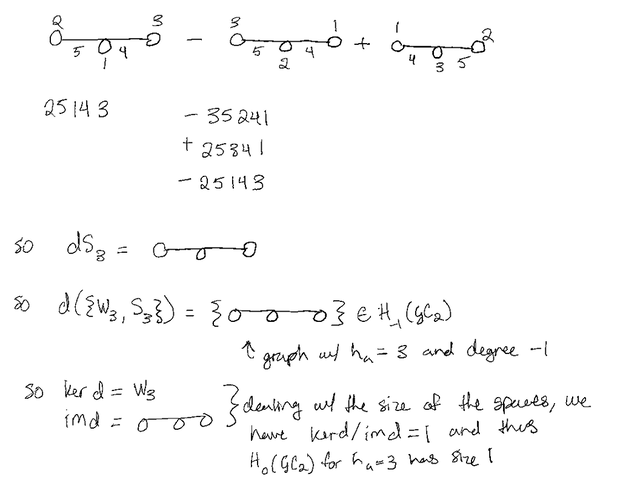
A general definition: suppose we have a pair of homomorphisms (the maps) \[C_{2} \xrightarrow{\delta_{2}} C_{1} \xrightarrow{\delta_{1}} C_{0}\] Then the homolgoy group is \(H_{0}(X_{1}) = \frac{ker\delta_{1}}{Im\delta_{2}}\) for some \(X_{1} \in C_{1}\).
The homology classes \(H_{n}\) of the graphs in \(\mathcal{G}\mathcal{C}_{2}\) are identified by \(n\), the value of \(e_{G} - 2h_{G}\) - called the homological degree - with \(e_{G}\) the number of edges and \(h_{G}\) the number of loops in the graph, and by \(h_{G}\) itself in reference to table 1 and 2 in Brown's paper where the size of each homology class \[H_{n}(\mathcal{G}\mathcal{C}_{2}) = \frac{ker d}{Im d}\] is presented as a "function" of \(h_{G}\). Consider the following sets of graphs... 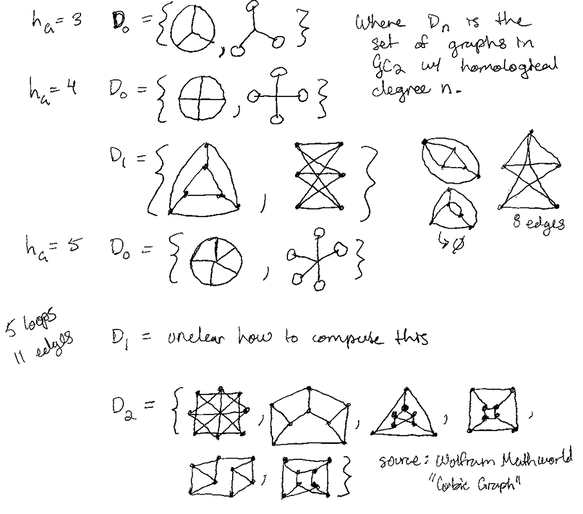
It may be useful to compute \(dD_{1, 2}\) for the sets of graphs given above as it may be illustrative of algebraic operations on the graphs in \(\mathcal{G}C_{2}\). However, for now I will instead provide only the brief example of computing the size of the homology class \(H_{0}(\mathcal{G}C_{2})\) arising from the set \(D_{0}\) with \(h_{G} = 3\).
Cohomology may be defined in terms of the dual of the cochain groups \(C_{i}\) given by \(C^{*}_{i}\) and the dual of the boundary homomorphism \(\delta\) denoted by the map \(\partial:C^{*}_{i} \mapsto C^{*}_{i+1}\). The cohomology classes are denoted by \(H^{n}(\mathcal{G}C_{2})\) and depend entirely on the respective homology class so we can determine the size of each cohomology class by that of the homology class. Since it is difficult to compute the homology classes of graphs in \(\mathcal{G}C_{2}\) due to the difficulty in generating complete groups of graphs \(D_{i}\), for large i, it would be useful to determine a way of generating these groups from the lower degree groups, namely those of degree 0. To this end, Brown proposes a conjecture that there exists a "non-canonical injective map" from the Lie algebra on the space of canonical differential forms \(w \in \Omega^{.}_{can}\) to graph cohomology groups: \[\mathbb{L}(\Omega^{.}_{can}) \mapsto \bigoplus_{n \in \mathbb{Z}} H^{n}(\mathcal{G}C_{2})\] And further that the map from primitive differential forms \(w^{4k + 1}\) generating the Lie algebra maps to \(H^{0}(\mathcal{G}C_{2})\) ie.: \[\mathbb{L}(\bigoplus_{k \ge 1} w^{4k+1}\mathbb{Q}) \mapsto H^{0}(\mathcal{G}C_{2})\]
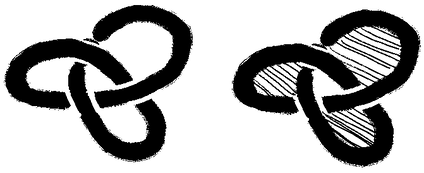
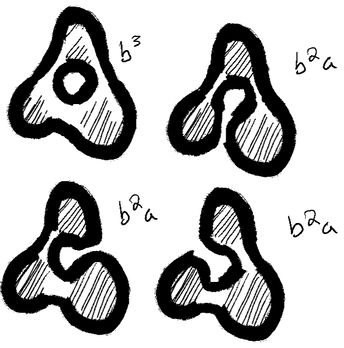
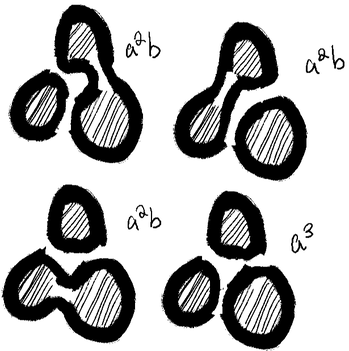
Defining the differential froms wG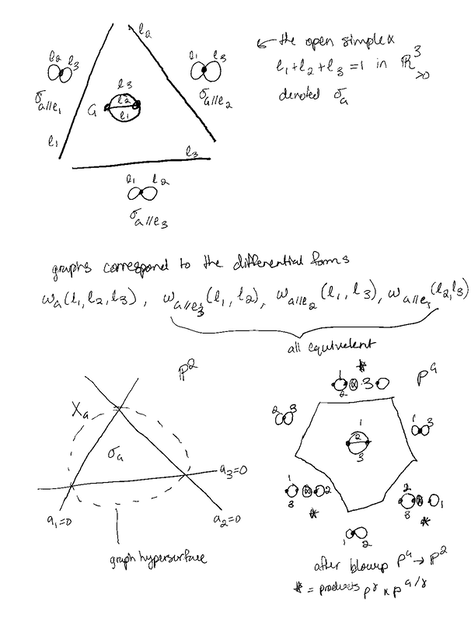
Figures 2 and 3 from pgs 6 and 8 of refrenced paper.
If we require that the lengths of a graph's edges are normalized such that their sum is one, then we may think of a graph with \(n\) edges of undefined or undetermined length as a polytope with \(n\) faces or equivalently as an open \(n\)-coordinate simplex \(\sigma_{G} = \{(x_{e})_{e \in E_{G}} : x_{e} > 0\} \subset \mathbb{P}^{E_{G}}(\mathbb{R})\). We may define a graph polynomial \(\Psi_{G}\) as follows: \[\Psi_{G} = det(\Lambda_{G}) = det(\mathcal{H}_{G}^{T}D_{G}\mathcal{H}_{G})\] where \(\mathcal{H}_{G}\) is the edge-cycle incidence matrix of a connected graph \(G\) and \(D_{G}\) is the \(n \times n\) matrix with the edge variables \(x_{e}\) along the diagonal. From \(\Psi_{G}\) we can define the 'graph hypersurface' \(X_{G} \subset \mathbb{P}^{E_{G}}\) as the set of states in which the values of the edge variables \(x_{e}\) cause \(\Psi_{G} = 0\).
The differential forms \(w_{G}^{4k+1} = tr((\Lambda_{G}^{-1}d\Lambda)^{4k+1})\) are Maurer-Cartan differential forms which generally take the form \[w_{G}^{4k+1} = C \times \frac{\Omega_{G}}{\Psi_{G}} = C \times \frac{\sum_{i = 1}^{n}x_{i}dx_{1}\wedge...\wedge d\hat{x_{i}}\wedge...\wedge dx_{n}}{\Psi_{G}^{4k+1}}\] where \(C\) is just some real coefficient. Of particular relevance to the second statement of the conjecture in the previous section is corollary 6.19 in which it is observed that for 3 connected graphs such as the wheel graphs with m spokes \(W_{m}\) the differential form has degree equal to \(e_{G} - 1\). An example of this is the form \(w_{W_{3}}^{5}\) for the graph \(W_{3}\) with 6 edges. In this special case of 3-connected graphs, the integrals of the differential forms (over the closed simplex \(\tilde{\sigma}_{G}\)) have some interesting properties analogous to those of the elements of the graph complex \(\mathcal{G}C_{2}\): 1. \(I_{(G, -\mu)}(\{\tilde{w}\}) = -I_{(G, \mu)}(\{\tilde{w}\})\) 2. \(I_{(G, \mu)}(\{\tilde{w}\}) = I_{(G, \tau(\mu))}(\{\tilde{w}\})\) for \(\tau\) an automorphism of \(G\) 3. \(I_{(G, \mu)}(\{\tilde{w}\}) = 0\) if \(G\) has a tadpole, a vertex of degree \(\le 2\), \(G\) has double edges, or if \(G\) is one-vertex reducible It is suggested that one may formulate such integrals on graph motives to generate motivic periods which may be useful in understanding how higher degree homology classes of \(\mathcal{G}C_{2}\) are generated. However, there is still no conjectured map from canonical differential forms to cohomotopy classes of the graph complex for degree greater than 0.
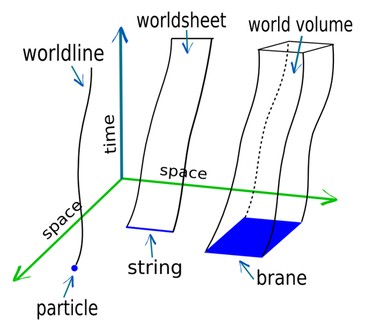
it will sweep out some \(p + 1\) dimensional surface (a line for \(p = 0\), area for \(p = 1\), volume for \(p > 1\)).
The world line, area, or (most generally) volume, can be determined by integrating the change in each of the \(D\) coordinates of \(X^{\mu}\) in relation to each of its parameters. I'll return to this shortly.
The most general form of the p-brane action is given by \(S_{p} = -T_{p}V\) where \(V\) is the world-volume to be minimized by the least action principal and \(T_{p}\) is described as a tension or energy density. Since time is standardly written as the first coordinate of a D-dimensional space-time, we can consider the example of a morphed string shown before with an added time axis in the vertical direction which would produce a morphing column over time similar to the examples shown in the image taken from Wikipedia at the start of this post.
The generalized volume factor in \(S_{p} = -T_{p}V\) for any p-brane in \(D\) dimensions is given by \[ V = \int\sqrt{-det(g_{\mu\nu}(X)\partial_{\alpha}X^{\mu}\partial_{\beta}X^{\nu}}d^{p + 1}\sigma\] where \(X^{0}\) corresponds to the axis \(\tau\), \(X^{1}\) to \(\sigma^{1}\), and \(X^{2}\) to \(\sigma^{2}\). We can note that \(X^{0} = \sigma^{0} = \tau\) thus \(\partial_{\sigma}X^{0} = 0\) and likewise, ...(CHECK). \(\alpha\) and \(\beta\) range over the values \(0, ..., p\) and \(\mu\), \(\nu\) range over the values \(0, ..., D-1\). The determinant serves to permute all nonzero combinations into a "single line" (or non-matrix form) equation and \(d^{p + 1}\sigma\) indicates the infinitesimal elements of the parameters \(\sigma\) and \(\tau\).
Specifically, for a string (p = 1) the action \(S_{1} = -TV\) simplifies to the Nambu-Goto action: \[S_{NG} = -T\int\sqrt{(\dot{X}\cdot X')^{2} - \dot{X}^{2}\cdot X'^{2}}d\sigma d\tau\] where \(\dot{X}^{\mu} = \frac{\partial X^{\mu}}{\partial\tau}\) and \(X'^{\mu} = \frac{\partial X^{\mu}}{\partial\sigma}\) with \(A\cdot B = \eta_{\mu\nu}A^{\mu}B^{\nu}\) for a flat space-time.
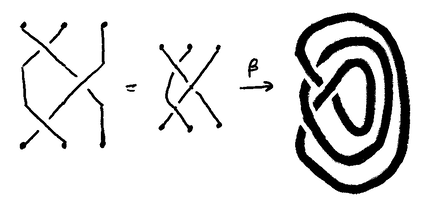
The closure of a braid connects the ends of the braid as shown to create a knot or knotted links. Mathematically, for a braid \(b\) the resulting closure is denoted by \(\beta(b)\)
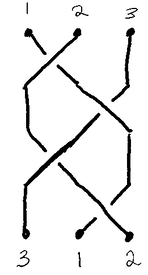
We can determine if the closure of a braid is a knot rather than links by considering the "canonical epimorphism" - which to my understanding essentially means a mapping of sorts - of the braid group \(B_{n}\) onto the permutation group \(S_{n}\). Consider the braid
The mapping \(B_{n} \mapsto S_{n}\) is thus a mapping of \(b \mapsto \sigma(b)\) where \(b_{i} \mapsto s_{i}\) and \(s_{i}\) denotes the switching of the \(i\)th and \((i+1)\)th numbers (or elements at said indices) in the sequence. Thus, for the braid b above, we have \(\sigma(b) = s_{1}s_{2}s_{1}s_{2}\) or we can reduce \(b\) to \(b = b_{2}b_{1}\) and get \(\sigma(b) = s_{2}s_{1}\). In either case, \(\sigma(b) = (3, 1, 2)\). Since this permutation can be obtained from the original point by moving each digit to the right once (w/ the last digit cycling to the front), this is a cyclic permutation. This means that the braid's closure yields a knot because the cyclic nature of the permutation ensures that we will pass through all points with a single strand when drawing the closure (this is much easier to make sense of if one draws the closure and follows the flow of the lines). More precisely, "the closure of \(\beta(b)\) of the braid \(b\) is a knot if and only if the permutation \(\sigma(b)\) associated to the braid generates the cyclic subgroup of order \(n\), \(\mathbb{Z}/n\mathbb{Z}\), in the permutation group \(S_{n}\)" (pg. 55).
Detour into permutations...
The permutation of \((1, 2, 3)\) to \((3, 1, 2)\) is denoted by \begin{pmatrix} 1 & 2 & 3\\ 3 & 1 & 2 \end{pmatrix} The identity permutation is essentially the non-permutation of \((1, 2, 3)\) and the order of a permutation \(\sigma\) is the number \(n\) such that \(\sigma^{n} = 1\) or the identity. The multiplication of permutations is performed like so: \begin{equation} \begin{pmatrix} 1 & 2 & 3\\ 3 & 1 & 2 \end{pmatrix} \begin{pmatrix} 1 & 2 & 3 \\ 3 & 1 & 2 \end{pmatrix} = \begin{pmatrix} 1 & 2 & 3 \\ 2 & 3 & 1 \end{pmatrix} \end{equation} \begin{equation} \begin{pmatrix} 1 & 2 & 3 \\ 3 & 1 & 2 \end{pmatrix} \begin{pmatrix} 1 & 2 & 3 \\ 3 & 1 & 2 \\ \end{pmatrix} \begin{pmatrix} 1 & 2 & 3 \\ 3 & 1 & 2 \end{pmatrix} = \begin{pmatrix} 1 & 2 & 3 \\ 1 & 2 & 3 \end{pmatrix} \end{equation} Thus, for our example the permutation has an order \(n\). The cyclic nature comes from the fact that we pass through all points in the process: \begin{align} 1 \mapsto 3 \mapsto 2 \mapsto 1 \\ 2 \mapsto 1 \mapsto 3 \mapsto 2 \\ 3 \mapsto 2 \mapsto 1 \mapsto 3 \end{align}
...end detour
The closure of braids is not injective, meaning that there isn't always a 1-to-1 map between braids and their closures. However, Alexander's Braiding Theorem does state that the closure operation is surjective meaning that all knots and links constitute the closure of some braid.
One way to prove this is via the Vogel algorithm which is as follows:
which is illustrated in the examples below.
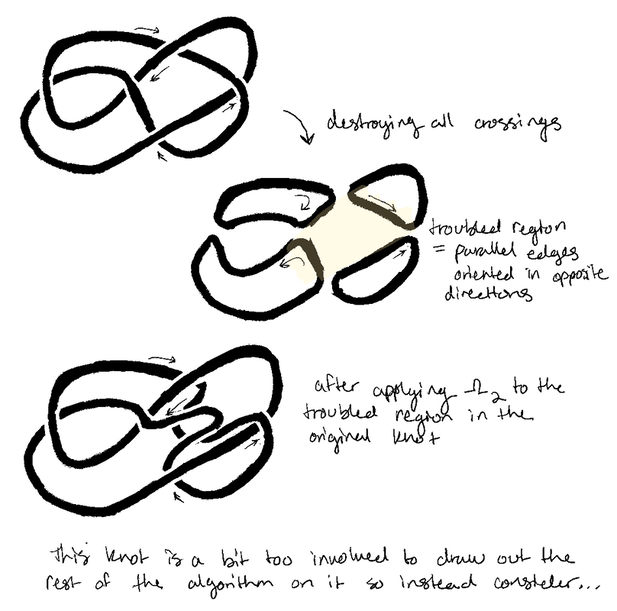
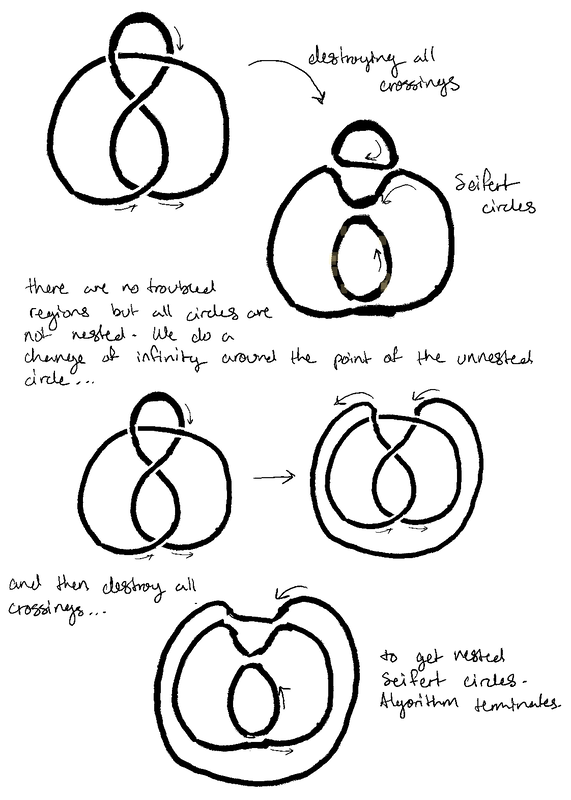
The algorithm always yields a set of nested Seifert circles in a finite number of steps thus proving that any knot is the closure of some braid (also note that the final change infinity move appears to take whatever single un-nested Seifert circle there is and braid it around so as to create a final outside Seifert circle around the already nested ones hence the lack of a loop back to the while loop). The act of drawing the steps as well as various braid closures should give one an intuitive understanding of this fact although I do hope to update this post with a proof eventually (time permitting or should it become necessary for further work).
The Markov Theorem states that the closures of two braids can be proven to be isotopic if and only if one braid can be transformed to the other by a finite sequence of the Markov moves which are defined as: 1. \(b \leftrightarrow aba^{-1}\) with \(a, b \in B_{n}\) 2. \(b \leftrightarrow bb_{n}^{\pm 1}\) with \(b \in B_{n}\) and \(b_{n} \in B_{n + 1}\)
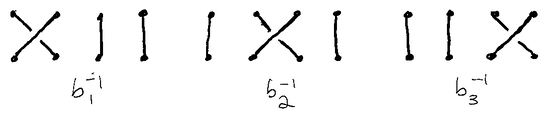
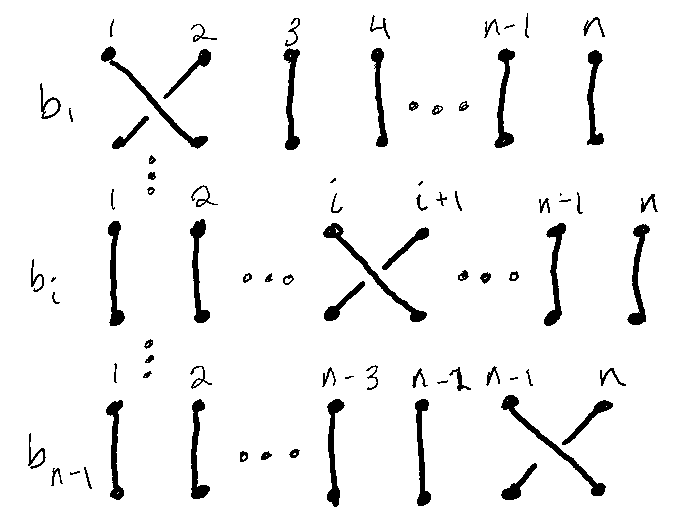
as well as their inverse \(b_{i}^{-1}\) which has the opposite crossing. For example, the braid group \(B_{4}\) has generators
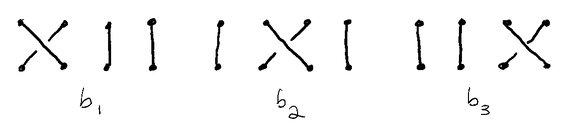
and inverses
The multiplication of 2 braids of \(n\) strands is then given by putting both braids end to end. For example, the identity \(b_{1}b_{1}^{-1}\) in \(B_{3}\) is identified as the braid

It is easy to see that this is equivalent to the identity which is 3 unbraided strands. Another way to determine the equivalence is to consider the permutation of the point (1, 2, 3).

It is pretty clear that braid multiplication is associative, ie. \(a(bc) = (ab)c\). The braid group is characterized by the Artin relations:
1. \(b_{i}b_{i}^{-1} = 1\) 2. \(b_{i}b_{i+1}b_{i} = b_{i+1}b_{i}b_{i+1}\) \(b_{i}b_{i+1}b_{i}^{-1} = b_{i+1}^{-1}b_{i}b_{i+1}\) \(b_{i}^{-1}b_{i+1}b_{i} = b_{i+1}b_{i}b_{i+1}^{-1}\) 3. \(b_{i}b_{j} = b_{j}b_{i}\) when \(|i - j| \ge 2\) relation 2 is called the braid relation and can be visualized as 
for the \(B_{3}\) group. The third relation is called far commutativity visualized as

for the \(B_{4}\) group.
Word Problem and Duhornoy Algorithm
A word \(w \in B_{n}\) is any sequence of multiplications of the generators of \(B_{n}\). A reduced word is described as \(w\) in the form where "any occurrence of the letter \(b_{i}\) is separated from any occurrence of the letter \(b_{i}^{-1}\) by at least one occurrence of a letter \(b_{j}^{\pm 1}\) with \(j < i\)" (pg. 53). Thus, the RHS of the last 2 braid relations are reduced while the LHS of the same are not reduced. Based on the property that any element of \(B_{n}\) (as per the Artin relations) may be represented by a reduced word, we have the Duhornoy algorithm which takes a non-reduced word to its reduced form.
An example of an application of the algorithm is given on page 54 (where the part of the word to be reduced is given in parenthesis in each step). Intermediate steps have been given in the places where I felt the book was not clear enough on what's actually happening. Each step constitutes an application of the appropriate Artin relation. \begin{split} w & = (b_{1}^{-1}b_{2}b_{1})b_{3}^{-1}b_{1}^{-1}b_{3}^{-1}b_{1} \\ R(w) & = b_{2}(b_{1}b_{2}^{-1}b_{3}^{-1}b_{1}^{-1})b_{3}^{-1}b_{1} \\ & = b_{2}b_{2}^{-1}b_{1}^{-1}b_{3}^{-1}b_{2}b_{3}^{-1}b_{1} \\ R^{2}(w) & = (b_{2}b_{2}^{-1})b_{3}^{-1}b_{1}^{-1}b_{2}^{-1}b_{3}b_{2}b_{3}^{-1}b_{1} \\ R^{3}(w) & = b_{3}^{-1}b_{1}^{-1}(b_{2}^{-1}b_{3}b_{2})b_{3}^{-1}b_{1} \\ R^{4}(w) & = b_{3}^{-1}(b_{1}^{-1}b_{3}b_{2}b_{3}^{-1}b_{3}^{-1}b_{1}) \\ & = b_{3}^{-1}(b_{2}b_{3}b_{1}b_{3}^{-1}b_{3}^{-1}b_{2}^{-1}) \\ R^{5}(w) & = b_{3}^{-1}b_{2}b_{3}b_{2}b_{1}b_{2}^{-1}b_{2}^{-1}b_{3}^{-1}b_{2}^{-1} \end{split} The Duhornoy algorithm functions a bit like an invariant but is stronger in the sense that we can say definitively that if two braids have the same reduced word then they constitute the same element of the braid group \(B_{n}\). In fact, this is an "if and only if" situation. It is with great regret that I report the absence of such 3D modelling software (see fig. 2 above) or an alternative head. Furthermore, I believe Mattel's marketing department to be in need of a new demographic. Unrelated but fine example of inflation *gasp, surprised emoji*.
The necessity for knot invariants arises from the need for a mathematically precise way to characterize and compare knots - ie. to determine if 2 knots are the same knot or if a given knot is nontrivial (not really a knot/the unknot) and likewise for links.
The first such invariant I was introduced to is the Jones Polynomial which is constructed from the bracket polynomial which is defined in terms of the conditions:
1. \(\langle L \rangle = a\langle L_{A} \rangle + b\langle L_{B} \rangle\)
2. \(\langle L \sqcup \bigcirc \rangle = c \langle L \rangle\) 3. \(\langle \bigcirc \rangle = 1\)
For a given polynomial, relations between the variables a, b, and c are determined such than the resulting polynomial is invariant under each of the 3 Reidemeister moves.
The most straight forward and (brute forced) method to compute the bracket polynomial for a knot with n crossings is by identifying alternating regions created by the knot as regions A and B like so:
The generalized formula for the bracket polynomial is then
\[\langle L \rangle = \sum_{s}a^{\alpha(s)}b^{\beta(s)}c^{\gamma(s)-1} = \sum_{s}a^{\alpha(s)-\beta(s)}(-a^{2}-a^{-2})^{\gamma(s)-1}\] where \(s\) is the identifier of each of the \(2^{n}\) states and \(\alpha(s)\) is the exponent on \(a\), \(\beta(s)\) is the exponent on \(b\) and \(\gamma(s)\) is the number of circles created.
For the example above, we get \begin{split} \langle L \rangle & = a^{3}(-a^{2}-a^{-2})^{2} + (a^{-3} + 3a)(-a^{2}-a^{-2}) + 3a^{-1}\\ & = a^{7} - a^{3} - a^{-5} \end{split}
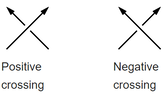
For oriented knots and links we can then define the writhe number as
\[w(L) = \sum_{i}\epsilon_{i}\] where \(i\) is the sum over the \(n\) crossings and \(\epsilon\) is defined as + or -1 as per the diagram below
We can now define the Kauffman polynomial as
\[X(L) = (-a)^{-3w(L)}\langle |L| \rangle\]
By virtue of it's construction, the Kauffman polynomial is invariant under each of the Reidemeister moves and thus constitutes a an isotopy invariant for oriented knots and links. The Jones polynomial is then very easily obtained from the Kauffman polynomial by applying the map
\[a \mapsto q^{-\frac{1}{4}}\]
The Jones polynomial satisfies the relations 1. \(q^{-1}V(L^{+}) - qV(L^{-}) = (q^{\frac{1}{2}} - q^{-\frac{1}{2}})V(L^{o})\) ...note, this is the skein relation 2. \(V(L \sqcup \bigcirc) = -(q^{-\frac{1}{2}} + q^{\frac{1}{2}})V(L)\) 3. \(V(\bigcirc) = 1\)
An easier way to calculate the Jones polynomial however is to define the positive and negative links as per the relations shown above and apply the algorithm shown below for the trefoil knot.
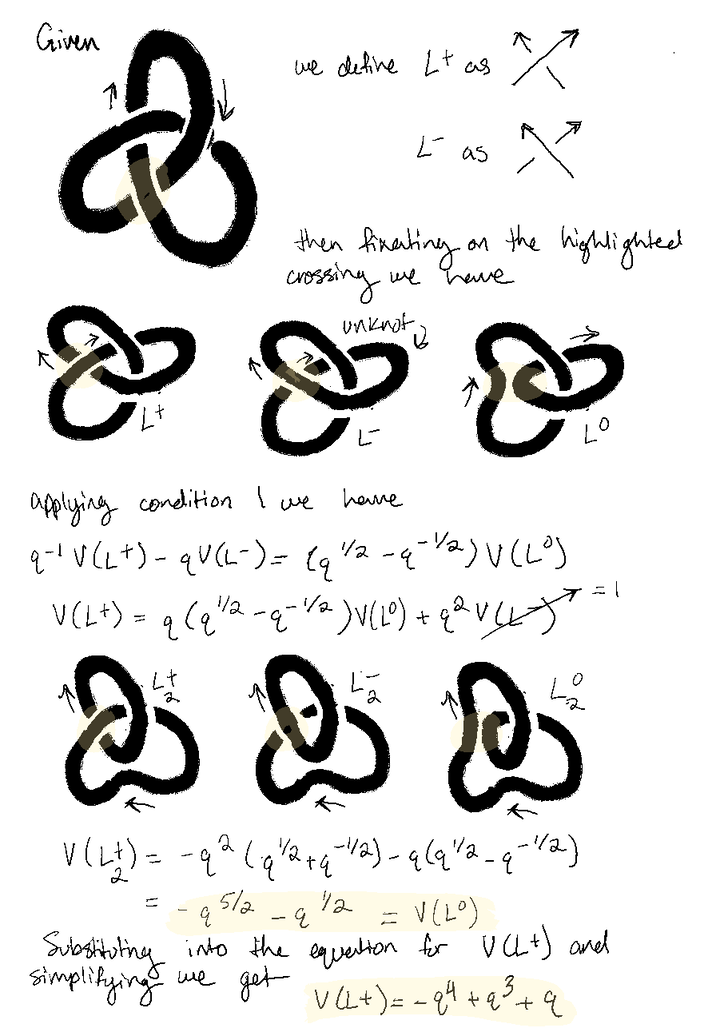
The Jones polynomial can tell us if two knots are different or nonisotopic if they have two different Jones polynomials. However, it is important to note that the Jones polynomial cannot guarantee that two knots with the same Jones polynomial are isotopic or the same. The Jones polynomial can also be defined in terms of 2 variables as
\[\frac{1}{\sqrt{\lambda}\sqrt{q}}\chi(L^{+}) - \sqrt{\lambda}\sqrt{q}\chi(L^{-}) = \frac{\sqrt{q}-1}{\sqrt{q}}\chi(L^{o})\]
This version of the Jones polynomial can then be used to obtain any of these common invariants via a change of variables:
Conway polynomial: \(\mapsto \nabla(L^{+}) - \nabla(L^{-}) = z\nabla(L^{o})\)
Alexander polynomial: \(\mapsto \Delta(L^{+}) - \Delta(L^{-}) = \frac{1}{\sqrt{1 - t^{2}}}\Delta(L^{o}) \) HOMFLY polynomial: \(\mapsto x\mathcal{P}(L^{+}) - t\mathcal{P}(L^{-}) = \mathcal{P}(L^{o})\) |
Archives
December 2021
Categories |

 RSS Feed
RSS Feed